
Motionet™
MN100
Single Axis Controller for Networked Applications
Motionet™
MN100
Single Axis Controller for Networked Applications
| FEATURES:
|
 |
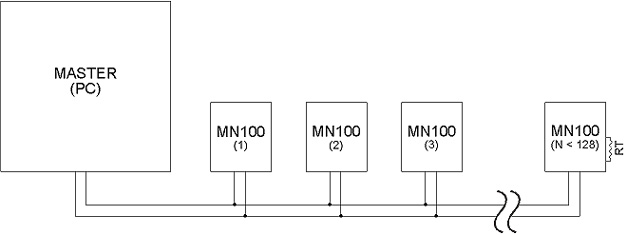
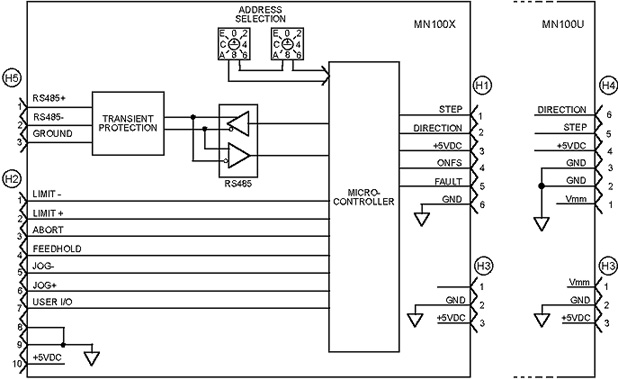
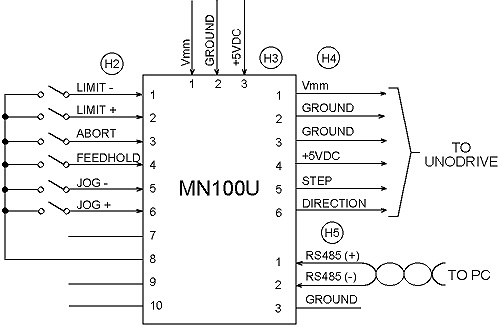
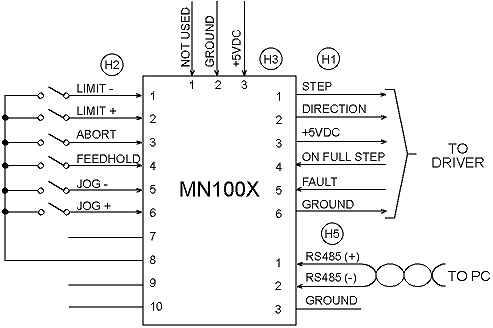
The MN100 is a single axis stepper motor controller. It communicates with a master controller or a PC via RS485 serial port. The MN100 controller can be used with our DM8010, DR8010, DM4050, and UnoDrive or with any third party driver that accepts industry standard step and direction commands.
SPECIFICATIONS:
| Maximum Step Rate | 20,000 pulses/sec |
| Minimum Step Rate | 20 pulses/sec |
| Operating Voltage | 5 VDC ±5% |
| Current Requirements | 100mA max. |
| Outputs | 1 Step and 1 Direction (TTL compatible) |
| Inputs | 6 TTL compatible (See Table 3) |
| I/O Ports | 1 User Defined I/O (TTL compatible) |
| Output Current Drive | 25 mA sink or source on each output |
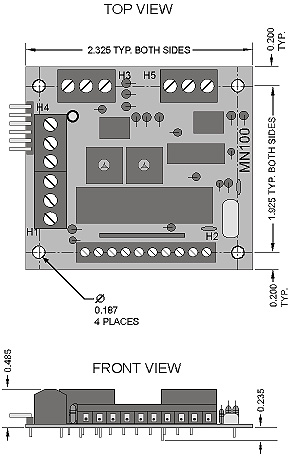
| Physical dimensions | 2.235" w × 2.325" d × 0.75" h |
| Working temperature range | 32° F ~ 158° F (0° C ~ 70° C) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MN100 Command Summary
| Command | Command Definition | Parameter | Function |
| E | Read Position | None | Returns the position counter. |
| F | Profile Select | 0 to 5 | Selects the acceleration profile (See Table 4). |
| G | Jog Tap Steps | 1 to 255 | Set the number of steps per button push. |
| H | Hold | 0 or 1 | 0 - disables synchronized moves between drivers. Execute
moves immediately. 1 - enables synchronized moves between drivers. Waits for release command before executing move commands. (Remote) |
| I | Set Mode | 0 or 1 | 0 - absolute mode (default) 1 - incremental mode |
| K | Release | None | Enables move commands if HOLD is enabled. (Remote) |
| L | Load Count | ±8,388,607 | Loads the position register with the specified data. |
| M | Move | ±8,388,607 | Performs an accelerated move generating the specified number of steps. Returns exit code if an error occurred or if the move was terminated by a switch closure. |
| N | Read Count | None | Returns the number of uncompleted steps. |
| O | Loop | None | Restart the program from beginning. (Program) |
| Q | Abort Move | None | Aborts the move in progress. (Remote) |
| R | Read Memory | None | Returns the program stored in memory. |
| S | Port Status | 0 to 2 | Returns status of the input ports (port0 or port 2). |
| U | Run Program | None | Runs the program stored in memory. (Remote) |
| V | Velocity | 20 to 20000 | Sets the speed in steps/sec. |
| W | Wait | None | Halts program until input is low. (Remote) |
| Y | Jog Speed | 20 to 20000 | Sets the speed for jogging (not accelerated). |
| Z | Program Mode | None | Puts the device in program mode. All subsequent commands are written to memory until <Ctrl-D> is received. (Remote) |
| ? | Firmware Revision | None | Returns the device name and firmware revision. (Remote) |
| * | Poll | None | Request response from all connected controllers. (Remote) |
| & | Retransmit | None | Request the MN slave to resend the last message. (Remote) |
| ~ | Change Baud Rate | 0 to 4 | Changes baud rate. Must be sent to all devices simultaneously (address 0) . 0 - 9600, 1 - 19200, 2 - 38.4K, 3 - 57.6K, 4 - 115K. (Remote) |
| ! | Configure and Read/Write I/O Port | 0 to 3 | Controls reading and writing of I/O port. 0 - output at 0VDC (low) 1 - output at 5VDC (high) 2 - input to run program on switch closure (default) 3 - input with interrupt (high to low transition) (Remote) |
| # | Label | <text> | Marks a point in the program for branching. (Program) |
| ^ | Branch | <text> | Transfers program execution to a line following a # with matching label. (Program) |